
Robot d'emboutissage à 4 axes pour presse



Présentation du produit
Compte tenu de la demande réelle de modernisation et de transformation de l'industrie de l'emboutissage, un robot de manutention d'emboutissage à 4 axes à haute flexibilité et à contrôle simple est conçu et développé.
Le robot d'emboutissage quatre axes adopte une conception à quatre axes, compacte, compacte et légère. Il est largement utilisé dans le soudage à l'arc sous argon, la palettisation, la manutention, l'emboutissage et d'autres domaines. Il assure une manutention stable et un soudage précis. Le manipulateur de poinçonnage quatre axes permet des opérations d'emboutissage flexibles dans un espace réduit, et son installation et sa mise au point sont simples et pratiques.
Pièces de base
Toutes les pièces de marque chinoise de haute qualité
servomoteur
Le servomoteur est de marque chinoise Ruking, offrant des avantages tels qu'une réaction rapide et un excellent rapport couple/inertie au démarrage. Il peut supporter des conditions de fonctionnement difficiles, avec des accélérations et décélérations fréquentes en marche avant et arrière, et supporter des surcharges multiples en peu de temps.
SYSTÈME DE CONTRÔLE LNC
Le robot Yooheart adopte la programmation pédagogique. Son fonctionnement est simple, pratique et flexible. Il prend également en charge la programmation à distance, ce qui permet de l'appliquer à des programmes complexes.
CORPS DU ROBOT
Le corps adopte le processus de moulage sous pression, en utilisant la cavité du moule pour appliquer une pression élevée à la formation du métal en fusion, le corps formant une densité élevée, une forte rigidité, son propre poids est plus léger.
Détail Afficher
Haute précision
Réponse à une action rapide
Et le niveau est en tête
dans le pays
Structure simple
Facile à entretenir
Plus rentable
Grande vitesse et stabilité
Chemin précis
Solutions d'estampage parfaites
Paramètres du robot
| Projet | Spécification | Projet | Spécification | Axe | Plage de mouvement | Vitesse maximale | Diamètre creux |
| Axe | 4 | Température | 0℃-45℃ | J1 | ±170º | 190º/s | —— |
| Capacité | 3,7 kVA | Humidité | 20-80% HR (pas d'humidité) | J2 | +10º~+125º | 120º/s | —— |
| Poids | 170 kg | Vibration | Moins de 4,9 M/S² | J3 | +10º~-95º | 120º/s | —— |
| Charge utile maximale | 10 kg | Autres | Pas de gaz et de liquides inflammables et corrosifs, tenir à l'écart des sources de bruit électrique | J4 | ±360º | 200º/s | —— |
| Plage de travail maximale | 140CM | Répétabilité | ± 0,08 mm | Niveau IP | IP65 | Installation | Sol |
Application robotique
Chargement et déchargement de produits d'extrusion à chaud
Ce projet concerne principalement l'emboutissage du cuivre. Le procédé de poinçonnage rouge est un procédé d'extrusion à chaud. Lors du poinçonnage rouge, le métal est chauffé à une température donnée puis placé dans un moule préchauffé. Après un mouvement alternatif unique de la machine-outil sous pression, le métal subit une déformation plastique afin d'obtenir la taille, la forme et les bonnes propriétés mécaniques des pièces embouties. Le client utilise un robot de manutention 4 axes Yooheart pour le chargement et le déchargement des pièces métalliques poinçonnées rouge.
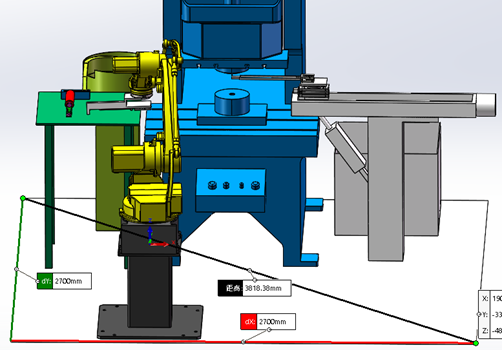
Présentation de la solution d'intégration
Le projet comprend une poinçonneuse, un robot Yunhua 4 axes de 10 kg, un outillage de positionnement secondaire et un dispositif de découpage de cylindres combinés, entre autres. Les données connues, telles que la cadence, la charge nominale et les conditions de fonctionnement, sont toutes comprises dans la plage de paramètres nominale du HY1010B-140.


Aperçu du processus de production
Alimentation manuelle pour palan ▶ Alimentation de la plaque vibrante ▶ Positionnement du dispositif d'alimentation avant chauffage ▶ Chauffage du tube à courant de Foucault ▶ Positionnement du dispositif de positionnement secondaire ▶ Serrage du robot ▶ Pressage de la poinçonneuse ▶ Déchargement du dispositif d'alimentation du cylindre
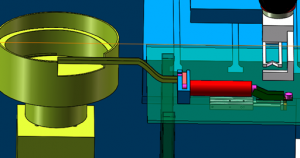
Résumé de l'action du dispositif d'alimentation et de positionnement
Alimentation manuelle de la plaque vibrante ▶ La plaque vibrante est l'alimentation en matériau du tube chauffant à courants de Foucault ▶ L'outil de positionnement secondaire est le positionnement de la pince du robot
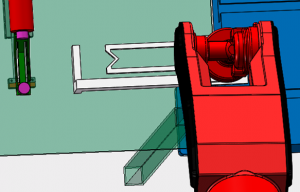
Aperçu de l'action du dispositif de serrage
Le robot serrera le matériau en cuivre positionné ▶ pour le formage par poinçonnage
Service après-vente
Nous avons un service après-vente parfait pour vous aider à apprendre le fonctionnement même si vous n'avez jamais utilisé de robots industriels et à résoudre les problèmes pendant votre temps d'utilisation.
Tout d’abord, nous vous fournirons les manuels associés pour vous aider à comprendre certaines informations sur le robot.
Ensuite, nous vous proposerons une série de vidéos pédagogiques. Vous pourrez les suivre étape par étape, du câblage à la programmation simple, en passant par la réalisation de programmes complexes. C'est le moyen le plus efficace de vous accompagner dans le contexte de la Covid-19.
Enfin, nous proposons un service en ligne avec plus de 20 techniciens. Pour toute question, n'hésitez pas à nous contacter à tout moment ; nous vous répondrons rapidement.


Demande de devis
Q. Est-ce sécuritaire pour les travailleurs ?
Bien sûr, l'un des avantages de l'utilisation de robots pour la prise et le placement est la protection des travailleurs contre les blessures. Un seul opérateur peut manipuler 5 à 6 machines CNC.
Q. Quel type de produit peut utiliser un robot de chargement et de déchargement ?
A. Chaque chargeur robotisé peut être équipé d'outils de bras adaptés à votre machine et à votre produit. Ces outils sont extrêmement précis et possèdent la dextérité nécessaire pour manipuler la pièce avec soin.
Q. Une seule extrémité des outils du bras peut être utilisée pour charger et décharger le robot ?
A. Le bras robotique industriel peut modifier le programme et la pince de préhension, les changements rapides dans l'entreposage intelligent, la vitesse de débogage, éliminant le besoin d'employés mais aussi de temps de formation, peuvent être rapidement mis en production.
Q. Y a-t-il d’autres avantages au chargement et au déchargement d’un robot ?
A. Améliorer la qualité de la pièce Apparences : lignes de production automatisées par robot, de l'alimentation, du serrage, de la découpe entièrement par robots, pour réduire les liens intermédiaires, la qualité des pièces est grandement améliorée, en particulier la surface est plus belle.
Q. Pouvez-vous fournir des solutions complètes pour le chargement et le déchargement de robots ?
A. Bien sûr, nous pouvons le faire avec notre revendeur.
Catégories de produits
-

YH1006A-175 : Robot de soudage 6 axes pour haute précision...
-
Robot de soudage MIG 6 axes pour rack de stockage
-

Poste de travail de soudage à l'arc robotisé à 7 axes
-

Palettiseur robotisé à 6 degrés de liberté et charge utile de 165 kg
-
Robot de soudage TIG avec dévidoir de fil
-

Robot de soudage à l'arc pour pièces automobiles



